
Localization using Deep Topological Maps
Brief description:
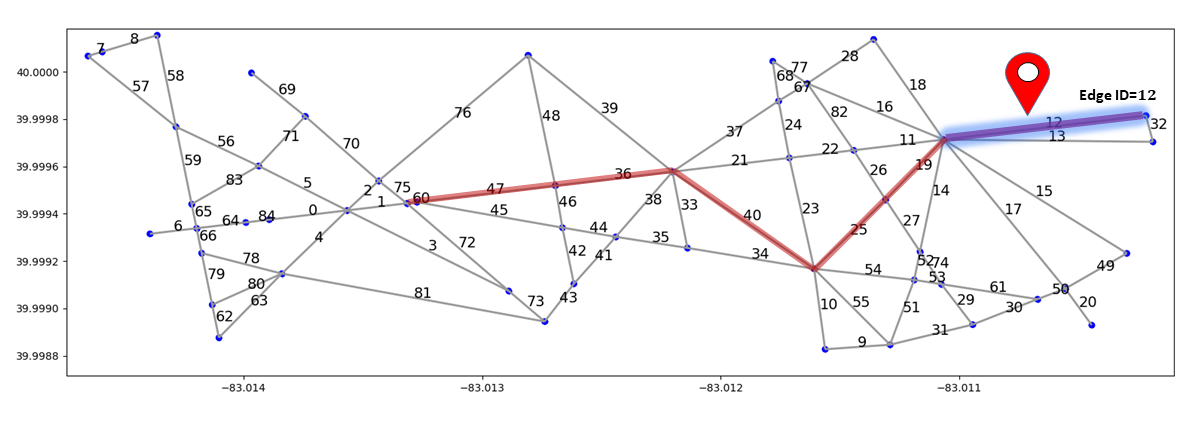
Given the topological representation of map $G$ which contains finite nodes $V$ and edges $E$, hence it is practical to assign unique id to each edge. When the trajectory is generated by other methods, such as inertial sensor or visual sensor, a sequence of significant turning angles could be calculated and represented as discrete value by quantization. The output is the edge represented by unique id where the last significant turning angle happens. Therefore, we formulate this localization problem as variable-length time series data classification problem.
Publications: